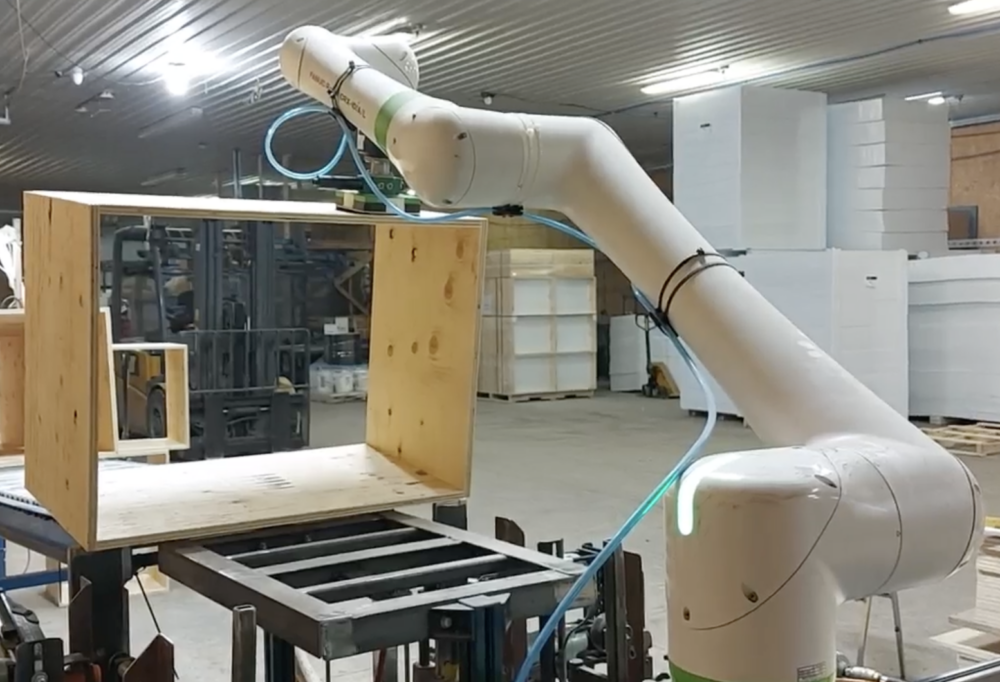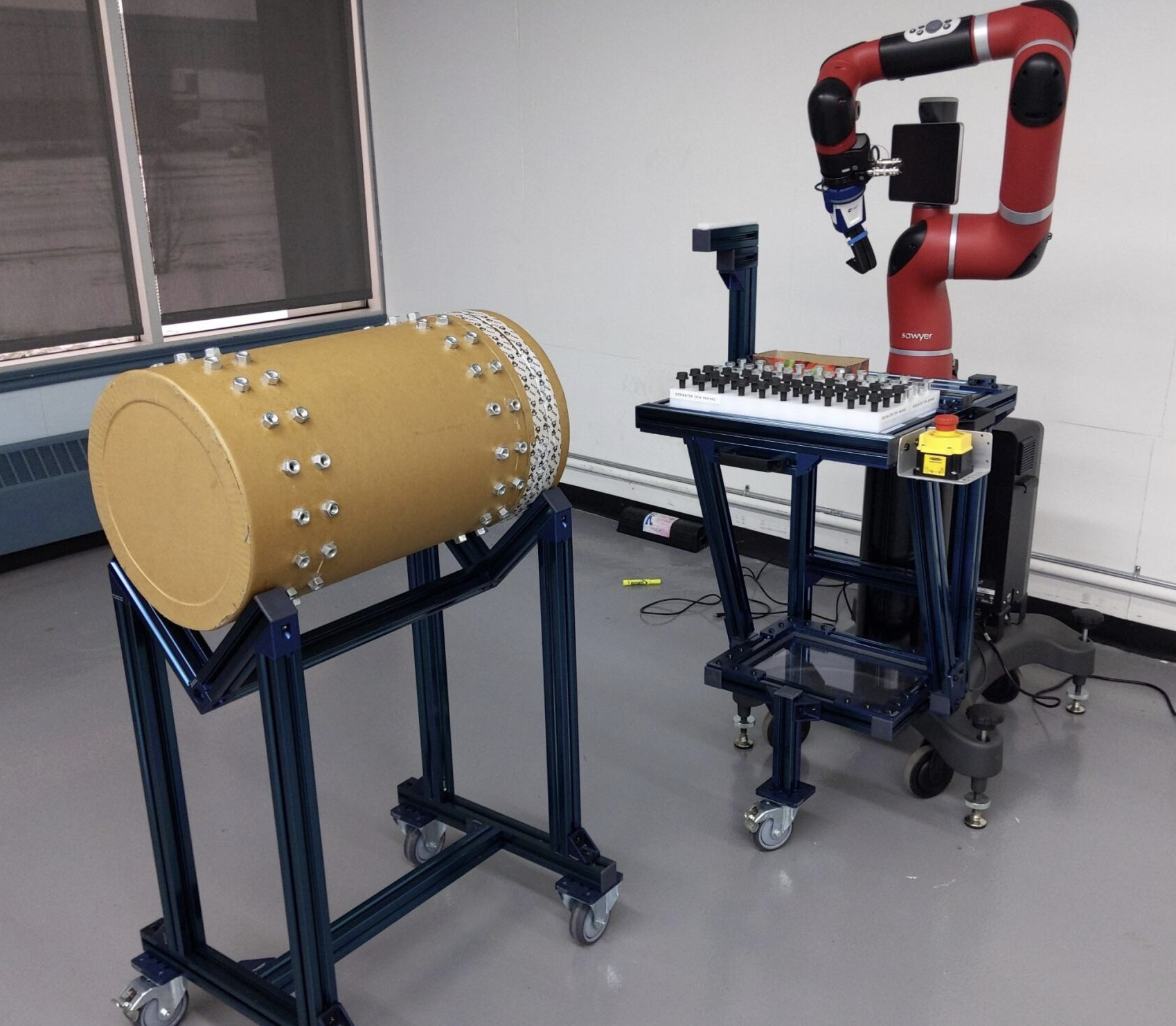
Assemblage moteur et alimentation presse par robots collaboratifs
- Design et fabrication de 2 stations de robots collaboratifs
- Support à recherche
- UR10e et Sawyer
Information sur le projet : Laboratoire de recherche sur la robotique collaborative
Type de projet : Clés en main
Client : IRSST
Date : 2020